Introdução
Servomotores são amplamente usados em vários projetos, seja em braços mecânicos, aeromodelos e etc. Em especial, o simpático e barato micro servo SG90 possui uma vasto número de projetos na comunidade maker. Uma de sua principal limitação é o fato de apenas poder girar entre 0 e 180 graus. Se eu te falasse que é possível mudar o SG90 para que possa funcionar como um motor contínuo e que seja possível controlar sua velocidade e direção com apenas uma entrada PWM ? Confira o vídeo a seguir:
Teoria
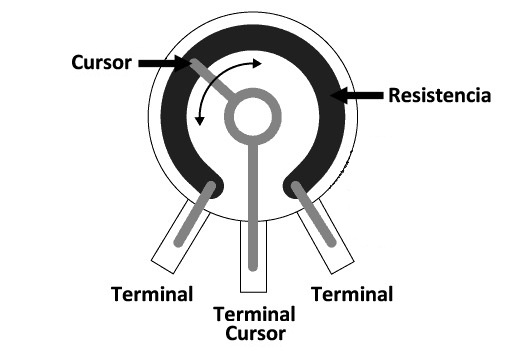
O que diferencia um servo motor em relação aos outros é o fato de ter dentro dele um encoder (dispositivo eletromecânico capaz de converter posição angular do eixo do motor em um sinal digital ou analógico) e um microcontrolador. Logo, quando enviamos um sinal que representa o ângulo que gostaríamos que o eixo se movesse estamos na verdade enviando para seu microcontrolador. Por sua vez o microcontrolador compara este valor com o valor do encoder e move o eixo do motor até que os dois sinais sejam idênticos. Dependo do valor da diferença dos valores o motor pode rotacionar mais rápido ou mais devagar. No caso, o encoder do SG90 é um potenciômetro linear, um resistor que varia seu valor através de um eixo mecânico. Conforme o eixo do SG90 gira ele muda valor do potenciômetro e dessa forma, o microcontrolador é capaz de ler o ângulo do eixo.
Nosso hack consiste em duas parte: a primeira é tirar a trava mecânica do servo para que o servo possa girar 360 graus e a segunda seria trocar o potenciômetro por uma resistência fixa. Dessa forma o servo rotacionar sem parar ao menos que seja enviando o mesmo sinal que representa a resistência fixa. Com isso se enviarmos valores acima da resistência o servo rotacionará para uma direção e idem para valores abaixo.
Passo a Passo
Lista de componentes:
- 1 x Micro Servo 9g SG90
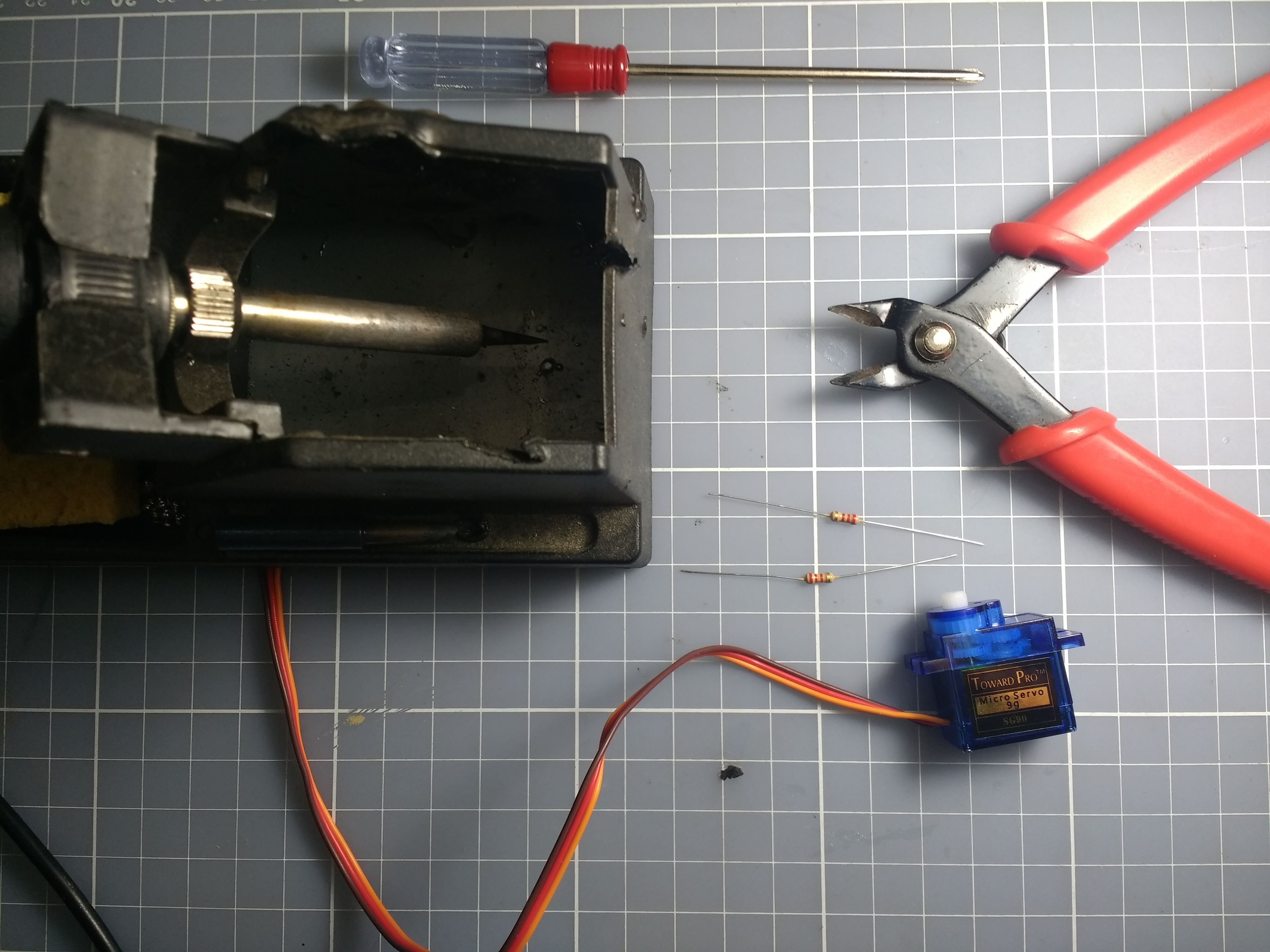
- 2 x Resistor 2k2 Ohms (três faixas vermelhas)
- 1 x Alicate de bico
- 1 x Ferro de solda
- 1 x Chave de fenda ou philips
Passo 1:
Remova os quatro parafusos com a chave philips.
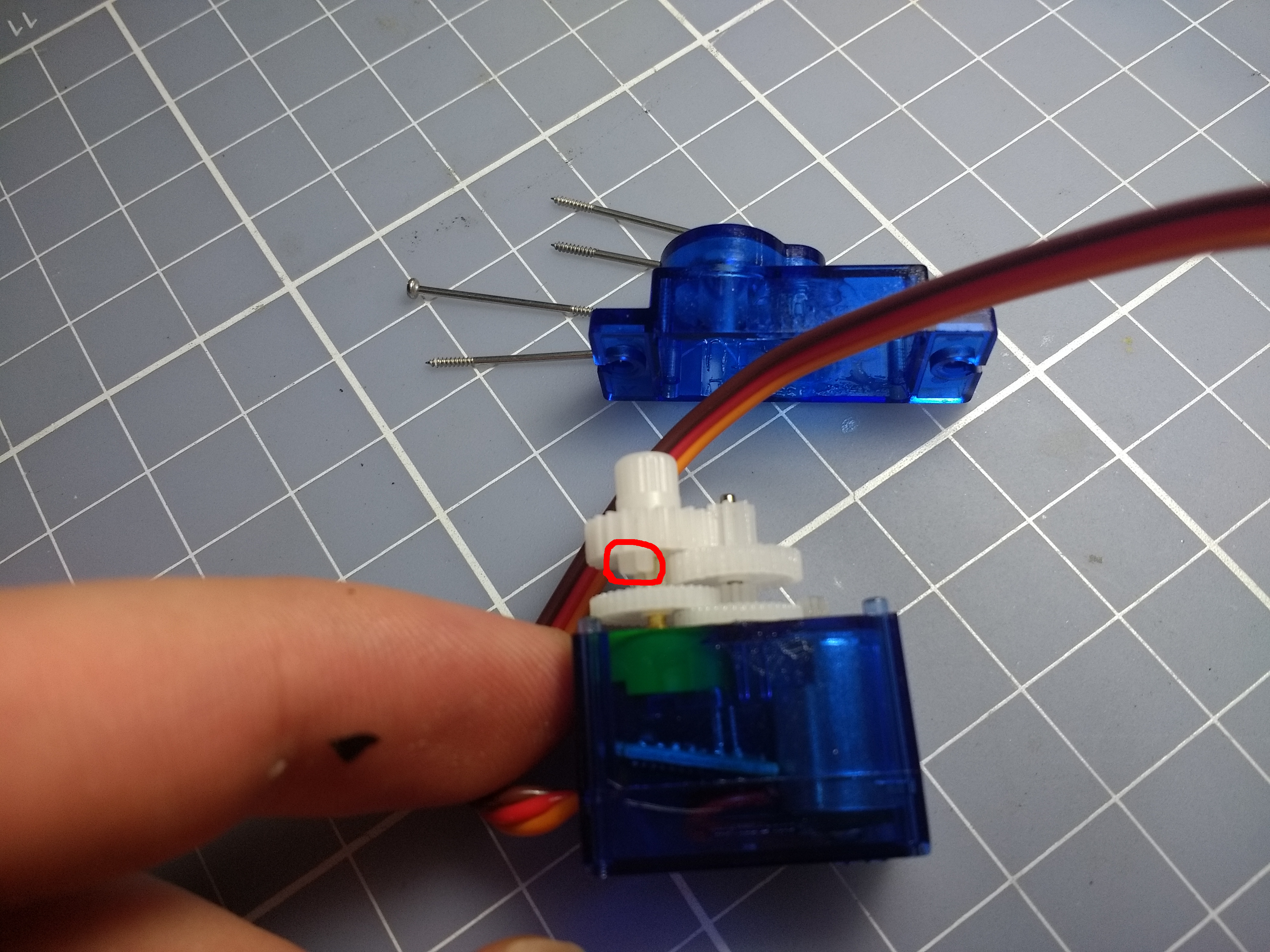
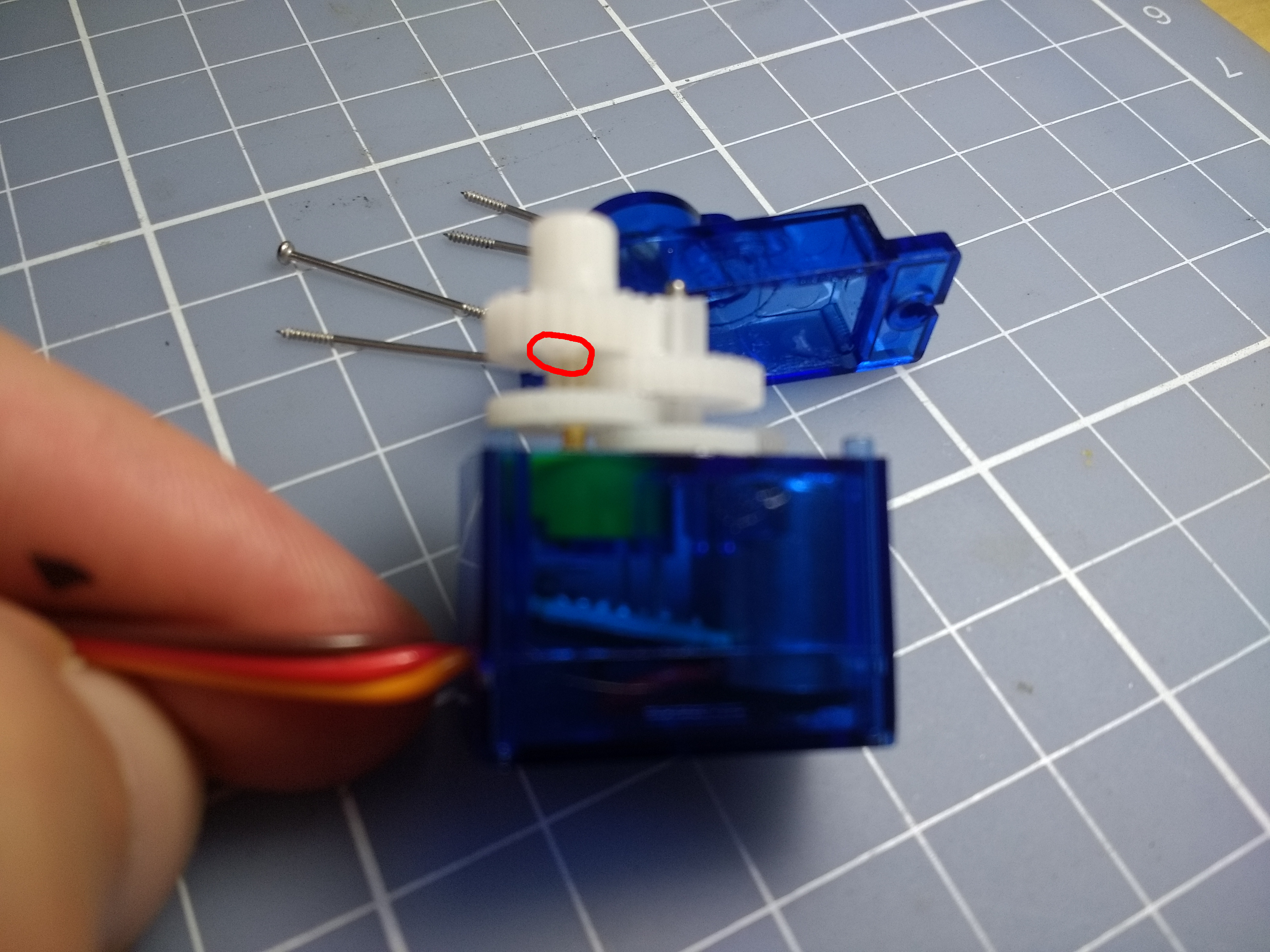
Passo 2:
Puxe com cuidado a tampa superior do servo e com o alicate de bico corte a trava mecânica, conforme indica a imagem a seguir:
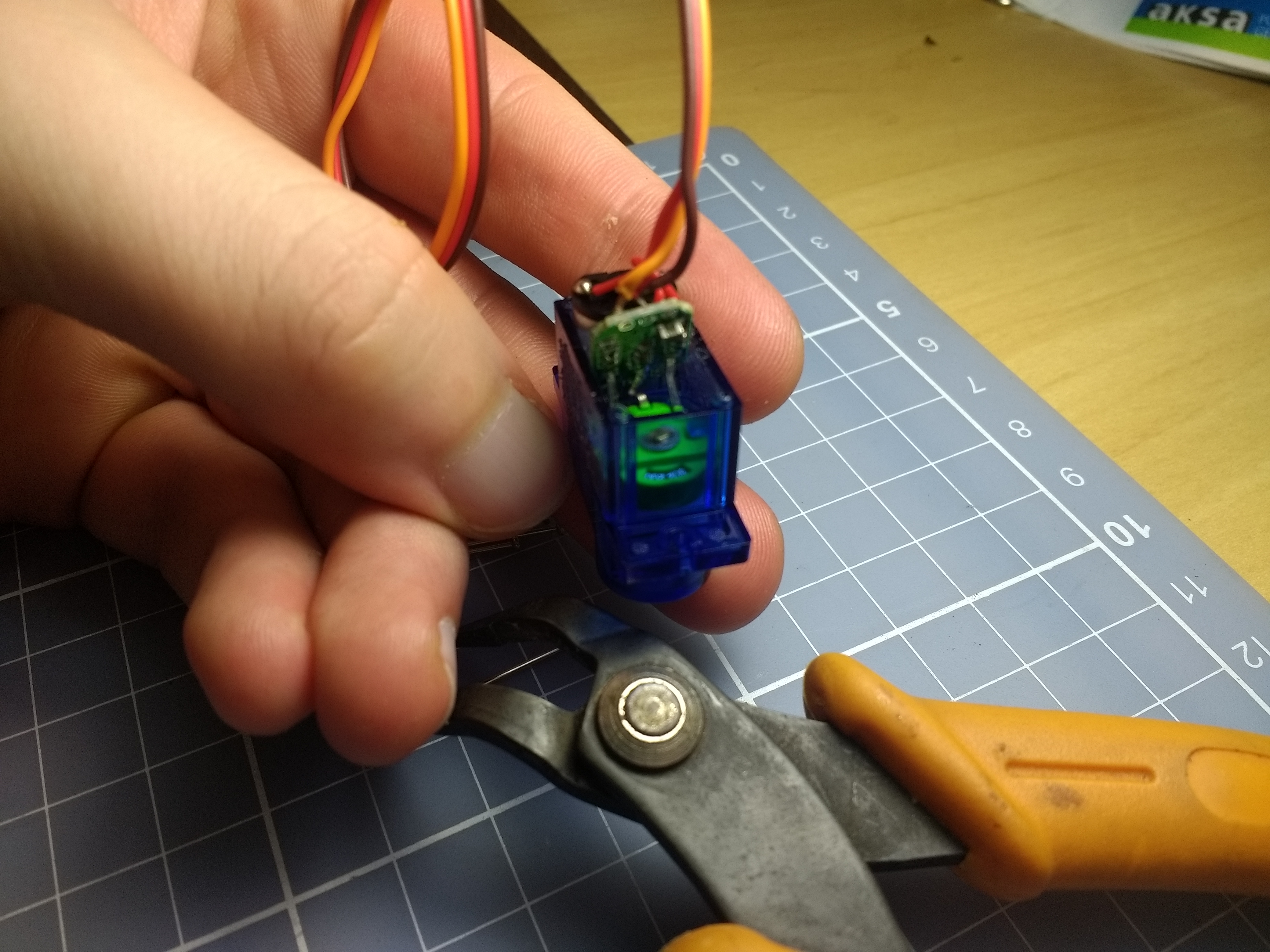
Passo 3:
Coloque a tampa superior no lugar e agora retire a tampa inferior. Puxe a placa do servo e corte os três pinos do potenciômetro. Dependo da marca do servo pode ser que o potenciômetro esteja ligado por três fios ao invés de três pinos. No caso, basta retirar os três fios.
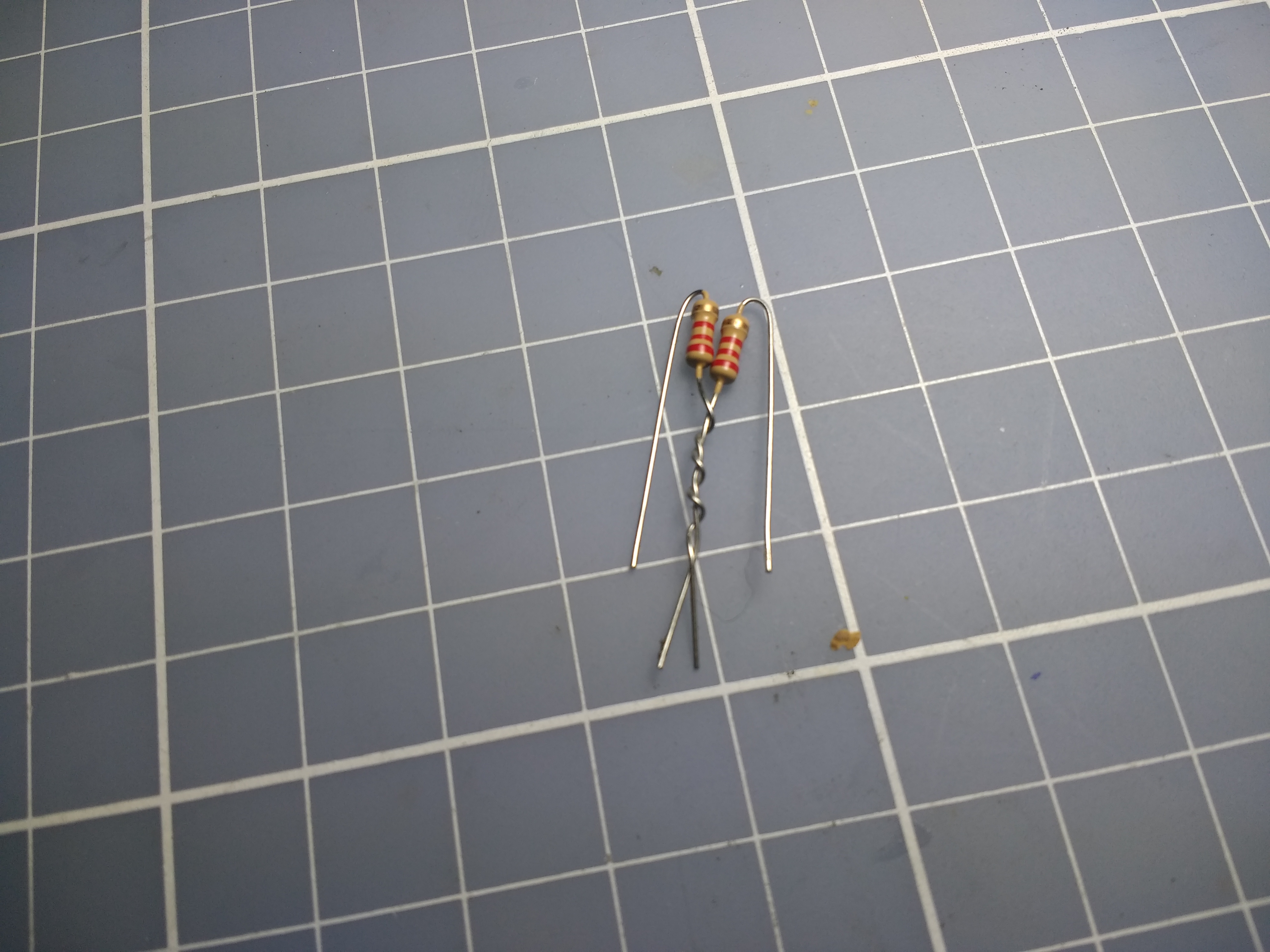
Passo 4:
Agora, arranje os dois resistores 2K2 Ohms de forma a idêntica a imagem a seguir:
Passo 5:
Usando o ferro de solda conecte as três pontas do arranjo dos resistores do passo 4 nos três pontos soltos onde anteriormente estava o potenciômetro. Cuidado para não usar muita solda e curto-circuitar pinos da placa (faça esse passo com paciência e calma X-X). Depois de soldado a placa do servo deve estar parecido com a imagem:
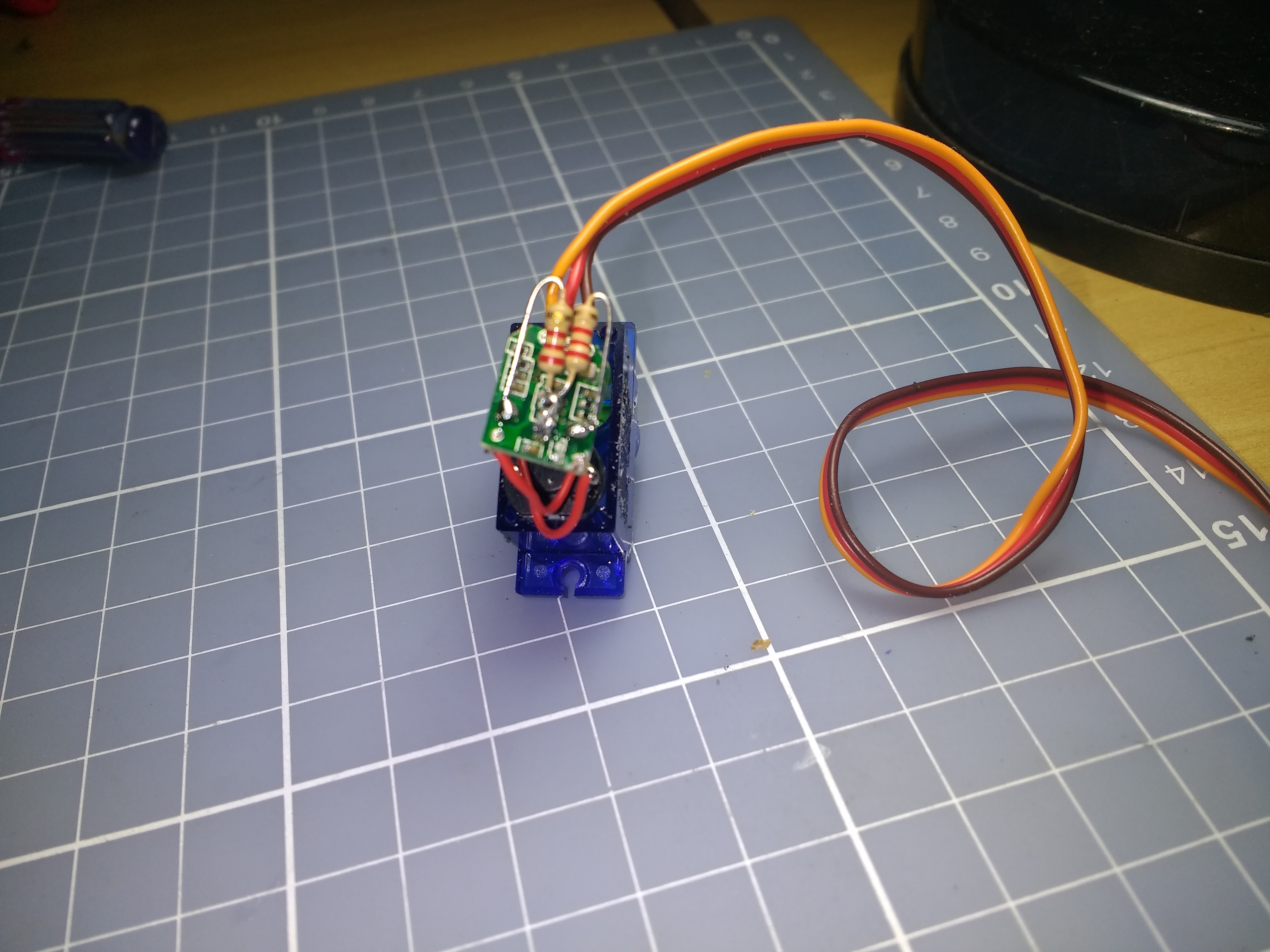
Passo 6:
Feche a tampa inferior do servo e coloque os quatro parafusos de volta e pronto. Agora temos um motor capaz de ter sua velocidade e direção controlada com apenas um pino!
Como usar:
Para usar nosso servo renascido basta usar os mesmos comandos da biblioteca Servo.h da IDE do Arduino. Porém agora controlamos a velocidade da rotação com servoWrite(). Para valores perto de 90 graus o servo estará quase parado, para valores acima o servo rotacionar no sentido horário e de forma mais rápida conforme se aproxima de 180 graus e forma idêntica porém para o sentido anti-horário para valores próximo de zero graus. Para mais informações de como usar um servo com arduino confira nosso tutorial